All categories
Featured selections
Trade Assurance
Buyer Central
Help Center
Get the app
Become a supplier
(578 מוצרים זמינים)








































































































































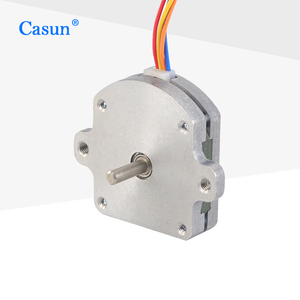
































































stepper motor variable reluctance הם רכיב חיוני בתחום העברת הכוח, במיוחד ביישומים הדורשים שליטה מדויקת בתנועה. מנועים אלה נועדו לנוע בצעדים בדידים, ומאפשרים מיקום מדויק וחזרה, שהיא חיונית בתחומים כמו רובוטיקה, הדפסה תלת ממדית ומכונות CNC. בניגוד למנועים מסורתיים, stepper motor variable reluctance אינם דורשים מערכות משוב כדי לקבוע את מיקומם, מה שהופך אותם לפשוטים וחסכוניים יותר עבור יישומים רבים. היכולת שלהם להשתלט באמצעות פולסים דיגיטליים הופכת אותם לתואמים מאוד למערכות אלקטרוניות מודרניות, מגשרים את הפער בין תנועה מכנית לשליטה דיגיטלית בצורה חלקה.
קיימים מספר סוגים של stepper motor variable reluctance, שכל אחד מהם מתאים ליישומים ולדרישות ביצועים שונות. הסוגים הנפוצים ביותר כוללים מנועי צעד מגנט קבוע, מנועי צעד סרבנות משתנה ומנועי צעד היברידיים. מנועי צעד מגנט קבוע משתמשים ברוטור מגנט קבוע ונודעים בפשטות וביעלות העלות שלהם, מה שהופך אותם לאידיאליים עבור יישומי מומנט נמוך. מנועי צעד סרבנות משתנה, לעומת זאת, אינם משתמשים במגנטים; במקום זאת, הם מסתמכים על העיקרון של סרבנות מגנטית, המאפשרת שיעורי צעד מהירים. מנועי צעד היברידיים משלבים את התכונות של מנועי מגנט קבוע ומנועי סרבנות משתנה, ומספקים ביצועים גבוהים יותר, מומנט גדול יותר ורזולוציית צעדים עדינה יותר. הבחירה של stepper motor variable reluctance תלויה במידה רבה בדרישות הספציפיות של היישום, כמו מומנט, מהירות וצרכי דיוק.
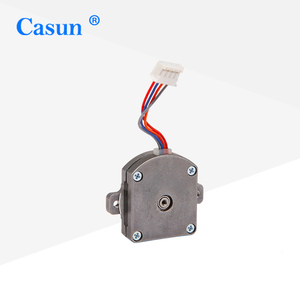
stepper motor variable reluctance מציעים מגוון של פונקציות ותכונות שהופכות אותם לבלתי ניתנים להחלפה ביישומי דיוק. אחת מהפונקציות העיקריות שלהם היא המרת פולסים דיגיטליים לתנועה מכנית מדויקת, המאפשרת שליטה מדויקת במיקום, במהירות ובתאוצה. תכונות מפתח של stepper motor variable reluctance כוללות מומנט גבוה במהירויות נמוכות, יציבות מצוינת במהירות נמוכה, ויכולת לשמור על מיקומים ללא צורך בכוח. זה הופך אותם שימושיים במיוחד ביישומים שבהם מיקום מדויק הוא קריטי, כמו בהדפסה תלת מימדית ובמכונות CNC. בנוסף, stepper motor variable reluctance ידועים בעמידותם ובאמינותם, ולעתים קרובות הם דורשים פחות תחזוקה מסוגי מנועים אחרים בשל הבנייה הפשוטה והיעדר מברשות.
בניית stepper motor variable reluctance כרוכה בשימוש בחומרים שונים כדי לייעל את הביצועים והעמידות. הרוטור עשוי בדרך כלל מחומרים פרומגנטיים איכותיים, אשר משפרים את הביצועים והיעילות המגנטיים. הסטטור, שבו נמצאים הפיתולים, נבנה לעתים קרובות מפלדה למינציה כדי למזער את הפסדי זרם העדי. פיתולי נחושת משמשים במידה רבה ב stepper motor variable reluctance בשל המוליכות החשמלית המצוינת שלהם, המבטיחה המרה יעילה של אנרגיה חשמלית לתנועה מכנית. החומרים המשמשים ב stepper motor variable reluctance נבחרים כדי לספק איזון בין ביצועים, עמידות ועלות, ומבטיחים פעולה אמינה בסביבות תובעניות. התקדמות במדע החומרים ממשיכות להניע שיפורים ביעילות ובביצועים של המנוע.
כדי להשתמש ב stepper motor variable reluctance בצורה יעילה, חשוב להבין את עקרונות הפעולה והמגבלות שלהם. בחירה נכונה של סוג המנוע בהתבסס על מומנט היישום, מהירות ודרישות דיוק היא קריטית. עבור ביצועים אופטימליים, stepper motor variable reluctance צריך להיות מונע עם מנהל התקן מתאים התואם את המפרטים של המנוע, הבטחת פעולה חלקה ומדויקת. חשוב גם לשקול את מתח אספקת הכוח ואת דרישות הזרם כדי למנוע התחממות יתר ולהבטיח פעולה יעילה. ביישומים הדורשים דיוק גבוה, ניתן להעסיק טכניקות מיקרוסטפינג כדי לשפר את הרזולוציה ואת החלקות של התנועה. תחזוקה שוטפת, כגון בדיקת חיבורים והבטחת קירור הולם, יכולה לעזור להאריך את חיי ה stepper motor variable reluctance ולשמור על הביצועים שלהם לאורך זמן.
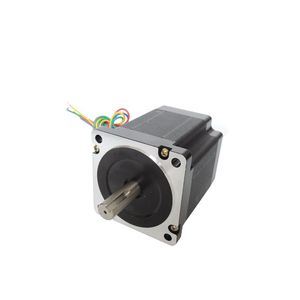
בעת בחירת stepper motor variable reluctance עבור היישום שלך, יש לקחת בחשבון מספר גורמים כדי להבטיח ביצועים אופטימליים. השיקול הראשון הוא דרישת המומנט, הקובעת את יכולתו של המנוע להניע או להחזיק עומס. יישומים הדורשים מומנט גבוה עשויים להפיק תועלת ממנועי צעד היברידיים, בעוד שאלה הזקוקים למומנט נמוך יותר עשויים לבחור בסוגים מגנט קבוע. בנוסף, הסביבה התפעולית ממלאת תפקיד מכריע; לדוגמה, מנועים המשמשים בתנאים קשים צריכים להיות בעלי בנייה חזקה וחומרים העמידים בפני בלאי. חשוב גם לשקול את רזולוציית הצעדים הרצויה, שכן צעדים עדינים יותר מספקים דיוק רב יותר בשליטה.
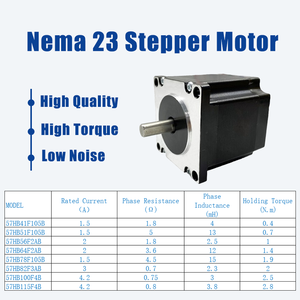
הבנת המפרטים של stepper motor variable reluctance היא חיונית כדי לבצע בחירה מושכלת. מפרטים מרכזיים כוללים את זווית הצעד, המשפיעה על הרזולוציה ועל החלקות של התנועה. זוויות צעד קטנות יותר מאפשרות שליטה מדויקת יותר, מועילה ביישומים כמו מכונות CNC. דירוגי המתח והזרם הם גם קריטיים, מכיוון שהם קובעים את צריכת הכוח והיעילות של המנוע. יתר על כן, מומנט האחיזה מצביע על יכולתו של המנוע לשמור על מיקומו כאשר אינו בתנועה, וזה חשוב במיוחד ביישומים הדורשים יציבות ודיוק. הערכת מפרטים אלה עוזרת להתאים את המנוע לדרישות הספציפיות של היישום.
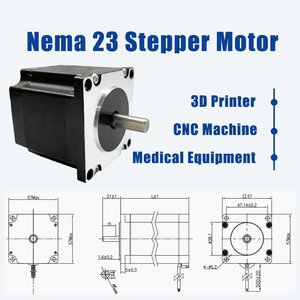
stepper motor variable reluctance נמצאים בשימוש נרחב בתעשיות שונות בשל יכולות השליטה המדויקות שלהם. בתחום הרפואי, הם מנוצלים בציוד כמו משאבות עירוי ומכשירי הדמיה, שבהם מיקום מדויק הוא מכריע. תעשיית הרכב מעסיקה מנועים אלה במערכות הדורשות תנועה אמינה וחוזרת, כגון בשליטה אלקטרונית במצערת. בתחום האלקטרוניקה הצרכנית, הם חיוניים במכשירים כמו מדפסות ומצלמות, המספקים תנועה מדויקת לתפוקות איכותיות. כל יישום דורש שיקול דעת זהיר של מפרט המנוע כדי להבטיח שהוא עומד בקריטריוני הביצועים הנחוצים.
ההבדל העיקרי בין stepper motor variable reluctance ומנועי סרוו טמון במנגנוני השליטה שלהם. מנועי צעד פועלים בצעדים בדידים ואינם דורשים מערכות משוב לשליטה במיקום, מה שהופך אותם לפשוטים ולעתים קרובות חסכוניים יותר. מנועי סרוו, לעומת זאת, מסתמכים על מערכות משוב כדי להשיג מיקום מדויק, המאפשר תנועה חלקה יותר ומהירויות גבוהות יותר.
כדי להגדיל את הדיוק של stepper motor variable reluctance, ניתן להעסיק טכניקות מיקרוסטפינג, המחלקות כל צעד מלא לתוספות קטנות יותר. זה משפר את הרזולוציה והחלקות, ומשפר את יכולתו של המנוע להשיג תנועות עדינות יותר. בנוסף, הבטחת הגדרות מנהל התקן אופטימליות ומזעור נגב מכני יכולים לתרום להגדלת הדיוק.
בעוד stepper motor variable reluctance מצטיינים ביישומים הדורשים דיוק במהירויות נמוכות, הם יכולים לשמש בתרחישים במהירות גבוהה על ידי בחירת סוג המנוע המתאים ומנהל התקן. מנועי צעד היברידיים מציעים לעתים קרובות ביצועים טובים יותר במהירויות גבוהות יותר בשל העיצוב שלהם. עם זאת, חשוב לוודא שמפרטי המנוע תואמים את דרישות המהירות כדי למנוע בעיות ביצועים.
תחזוקה עבור stepper motor variable reluctance כרוכה בדרך כלל בבדיקות שוטפות של חיבורים חשמליים והבטחת קירור הולם כדי למנוע התחממות יתר. בניגוד למנועים מצחצחים, למנועי צעד אין מברשות שנשחקות, מה שמפחית את צורכי התחזוקה. עם זאת, ייתכן שתידרש בדיקה תקופתית של רכיבים מכניים ושימון כדי לשמור על ביצועים אופטימליים.
כן, stepper motor variable reluctance ניתן להשתמש במכשירים המופעלים על ידי סוללה, בתנאי שצריכת הכוח של המנוע תואמת את קיבולת הסוללה של המכשיר. בחירת מנועים עם דרישות מתח וזרם נמוכות יותר יכולה לעזור לייעל את חיי הסוללה. בנוסף, מעגלים יעילים של מנהלי התקנים יכולים להפחית עוד יותר את צריכת הכוח, מה שהופך אותם למתאימים ליישומים ניידים.