
All categories
Featured selections
Trade Assurance
Buyer Central
Help Center
Get the app
Become a supplier
(20 מוצרים זמינים)








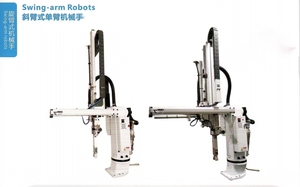































































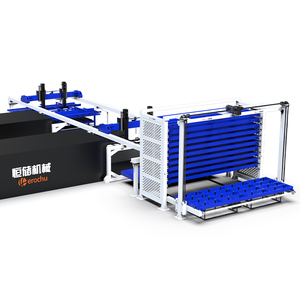










































automatic pick place cartesian robots הם מרכיב אינטגרלי בתחום הטיפול בחומרים תעשייתיים, המספקים דיוק ויעילות בהרמה, משיכה ומיקום של חפצים שונים. מכשירים מתוחכמים אלה, המתוכננים לאפשר את תנועתם של משאות כבדים, נועדו לייעל את הפעולות בתחומים מגוונים, לרבות ייצור, לוגיסטיקה ובנייה. באמצעות מינוף טכנולוגיות מתקדמות, automatic pick place cartesian robots מבטיחות בטיחות ופרודוקטיביות, והופכות משימות מורכבות לפעולות ניתנות לניהול. הרבגוניות שלהן מאפשרת להן לתת מענה לדרישות ספציפיות, והופכת אותן לחיוניות ביישומים תעשייתיים מודרניים.
קיימת מערכת רחבה של automatic pick place cartesian robots זמינים, כל אחד מותאם כדי לענות על צרכים תפעוליים ספציפיים. הסוגים הנפוצים ביותר כוללים מניפולטורים פנאומטיים, מניפולטורים הידראוליים ומניפולטורים חשמליים. מניפולטורים פנאומטיים משתמשים באוויר דחוס כדי לטפל במטענים, ומציעים שליטה חלקה ומדויקת, אידיאליים עבור יישומים הדורשים טיפול עדין. מניפולטורים הידראוליים מסתמכים על לחץ נוזלים, המספקים יכולות הרמה חזקות וחזקות המתאימות למשימות כבדות. מניפולטורים חשמליים משתמשים במנועים חשמליים כדי לאפשר תנועה, ומבטיחים פעולות חסכוניות באנרגיה עם השפעה סביבתית מינימלית. כל סוג של automatic pick place cartesian robots מתוכנן עם תכונות מובהקות כדי לייעל את הביצועים עבור השימוש המיועד.
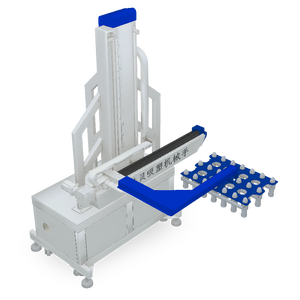
automatic pick place cartesian robots מצוידים במגוון של פונקציות ותכונות המשפרות את התועלת שלהם בסביבות תעשייתיות. הם נועדו להרים, להזיז ולמקם חפצים בדיוק, להפחית את העבודה הידנית ולהגדיל את היעילות. תכונות עיקריות כוללות ידיות ארגונומיות, אחיזות מתכווננות ומערכות בקרה אינטואיטיביות, המאפשרות קלות תפעול. ידיות ארגונומיות מפחיתות את עייפות המפעיל, בעוד אחיזות מתכווננות מתאימות לגדלים וצורות שונות של חפצים. מערכות בקרה אינטואיטיביות מאפשרות פעולה חלקה, ומאפשרות למפעילים לתמרן מטענים בדיוק ובביטחון. השילוב של מנגנוני בטיחות מבטיח עוד יותר כי automatic pick place cartesian robots ניתן להשתמש עם סיכון מינימלי, הגנה על שני המפעילים ואת החומרים המעורבים.
בניית automatic pick place cartesian robots כרוכה בשימוש בחומרים ורכיבים באיכות גבוהה כדי להבטיח עמידות וביצועים. חומרים נפוצים כוללים פלדה, אלומיניום וסגסוגות מרוכבות, שנבחרים בשל חוזקם וחוסנם. פלדה מספקת עמידות יוצאת דופן, מה שהופך אותה לאידיאלית עבור יישומים כבדים. אלומיניום מציע חלופה קלת משקל, המאפשרת יכולת תמרון קלה מבלי לפגוע בחוזק. סגסוגות מרוכבות מספקות איזון בין משקל לעמידות, המתאימות ליישומים מיוחדים. בנוסף, רכיבים כגון חיישנים, מפעילים ויחידות בקרה משולבים כדי לשפר את הפונקציונליות, ומאפשרים automatic pick place cartesian robots לבצע פעולות מורכבות בדיוק.
כדי למקסם את היתרונות של automatic pick place cartesian robots, חיוני להבין את ההנחיות התפעוליות שלהם ואת דרישות התחזוקה. שימוש נכון כרוך בבחירת הסוג המתאים בהתבסס על אופי המשימה ומשקל החפצים המעורבים. יש להכשיר מפעילים לטפל במערכות הבקרה ביעילות, ולהבטיח תנועות חלקות ומדויקות. תחזוקה שוטפת חיונית לשמירה על הפונקציונליות והאריכות ימים של automatic pick place cartesian robots. זה כולל בדיקות שגרתיות, שימון של חלקים נעים, והחלפה בזמן של רכיבים שחוקים. הקפדה על הנחיות היצרן תבטיח ביצועים ובטיחות אופטימליים, תפחית את זמן ההשבתה ותגביר את הפרודוקטיביות בסביבות תעשייתיות שונות.
בחירת automatic pick place cartesian robots המתאים לצרכים התעשייתיים שלך כרוכה בהבנה יסודית של הדרישות הספציפיות שלך ותנאי התפעול. אחד השיקולים העיקריים הוא סוג העומס שעליך לטפל בו, מכיוון שמניפולטורים שונים נועדו לנהל משקלים וגדלים שונים. לדוגמה, מניפולטורים פנאומטיים מתאימים למטענים קלים יותר וליישומים הדורשים טיפול עדין, בעוד מניפולטורים הידראוליים אידיאליים למשימות כבדות. בנוסף, פריסת סביבת העבודה ומקורות הכוח הזמינים הם גורמים מכריעים בקביעה אם automatic pick place cartesian robots חשמלי או ידני יהיה יעיל יותר.
גורם מהותי נוסף שיש לקחת בחשבון הוא הרבגוניות וההסתגלות של automatic pick place cartesian robots. סביבות תעשייתיות רבות דורשות ציוד שיכול לטפל במספר משימות או להסתגל לדרישות משתנות. חפש מניפולטורים עם אחיזות מתכווננות ומערכות בקרה הניתנות להתאמה אישית שניתן להתאים אותן לצרכים הספציפיים שלך. השילוב של תכונות מתקדמות כגון בקרי לוגיקה ניתנים לתכנות (PLCs) או חיישנים יכול לשפר את הפונקציונליות של המניפולטור, ולאפשר פעולות מדויקות יותר ולהפחית את הטעות האנושית. הבנת המפרט הטכני והיכולות של automatic pick place cartesian robots תעזור בקבלת החלטה מושכלת.
מניפולטורים מציעים מספר יתרונות בסביבות תעשייתיות, כולל יעילות מוגברת ועלויות עבודה מופחתות. על ידי שימוש automatic pick place cartesian robots, מפעילים יכולים להתמודד עם מטענים כבדים בדיוק, למזער את הסיכון לפציעה ולהבטיח פרודוקטיביות עקבית. בנוסף, מניפולטורים יכולים לשפר את איכות הפעולות על ידי מתן מיקום ותנועה מדויקים, וזה חיוני בתהליכי ייצור שבהם דיוק הוא חיוני.
בטיחות היא דאגה משמעותית בכל סביבה תעשייתית, ו automatic pick place cartesian robots ממלאים תפקיד מרכזי בשיפור הבטיחות במקום העבודה. על ידי טיפול במטענים כבדים וביצוע משימות מורכבות, מניפולטורים מפחיתים את העומס הפיזי על עובדים, וממזערים את הסבירות לפציעות במקום העבודה. הם מצוידים במנגנוני בטיחות כמו פונקציות עצירת חירום והגנה מפני עומס יתר, המבטיחים פעולה בטוחה גם בתנאים מאתגרים.
תחזוקה שוטפת חיונית כדי להבטיח את הביצועים לטווח ארוך של automatic pick place cartesian robots. זה כולל בדיקות שגרתיות כדי לבדוק אם יש בלאי, שימון של חלקים נעים וכיול של מערכות הבקרה. חיוני לעקוב אחר הנחיות התחזוקה של היצרן כדי למנוע השבתה בלתי צפויה ולשמור על היעילות והבטיחות של המניפולטור.
כן, automatic pick place cartesian robots יכולים להיות מותאמים מאוד כדי לענות על יישומים תעשייתיים ספציפיים. יצרנים מציעים מגוון אפשרויות, כולל אחיזות מתכווננות, מערכות בקרה הניתנות לתכנות ותכונות מיוחדות המותאמות למשימות מסוימות. התאמה אישית מאפשרת לעסקים לייעל את הפעולות שלהם, ולשפר את היעילות והפרודוקטיביות של המניפולטור.
שילוב automatic pick place cartesian robots במערכות קיימות דורש תכנון קפדני ושקילת גורמים מספר. חשוב להעריך את התאימות של המניפולטור עם הציוד הנוכחי ותהליכי זרימת העבודה. בנוסף, הכשרת מפעילים על המערכות החדשות והבטחת תקשורת חלקה בין המניפולטור למכונות אחרות הן חיוניות לשילוב מוצלח. שילוב נכון יכול לשפר את היעילות והפרודוקטיביות הכוללת של פעולות תעשייתיות.






